An encoder is the inverse of a Decoder: it takes a one-hot input ( lines, exactly one asserted) and produces the -bit binary code identifying which line was asserted.
A 4-to-2 encoder takes 4 input lines and outputs 2-bit code :
- → output
- → output
- → output
- → output
The Boolean equations are simple ORs:
is high when an odd-indexed input is asserted; is high when an upper-half input is asserted.
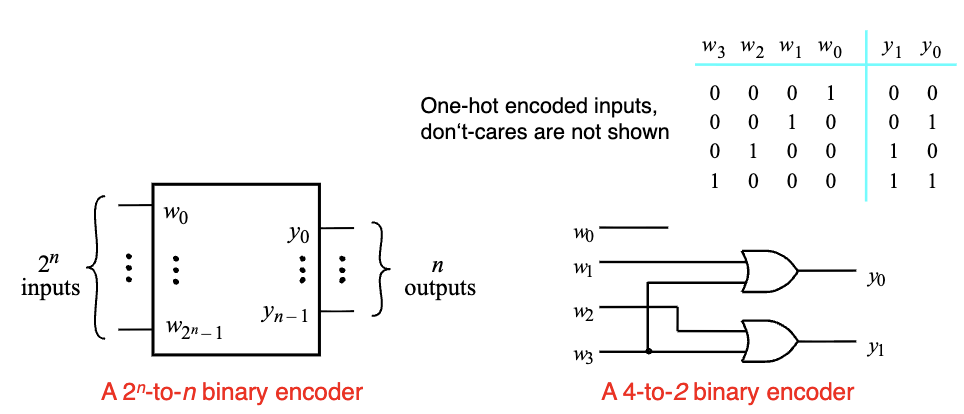
In the diagram, isn’t connected to either output gate. When is the only asserted input, both outputs are (), the correct binary code for “input .” This is also the encoder’s main limitation: the output is produced both when and when no input is asserted. The encoder can’t distinguish these cases by itself. That’s why a real encoder almost always carries a separate valid (or “any-input-asserted”) output. Without it, you can’t tell “input zero was selected” from “nothing happened.”
Why this is useful
Encoders compress information. A keyboard with 64 keys has 64 individual switches; an encoder converts that to a 6-bit code per keypress, which fits much more comfortably on a bus. Same trick for any peripheral that produces a one-hot signal you need to pack down.
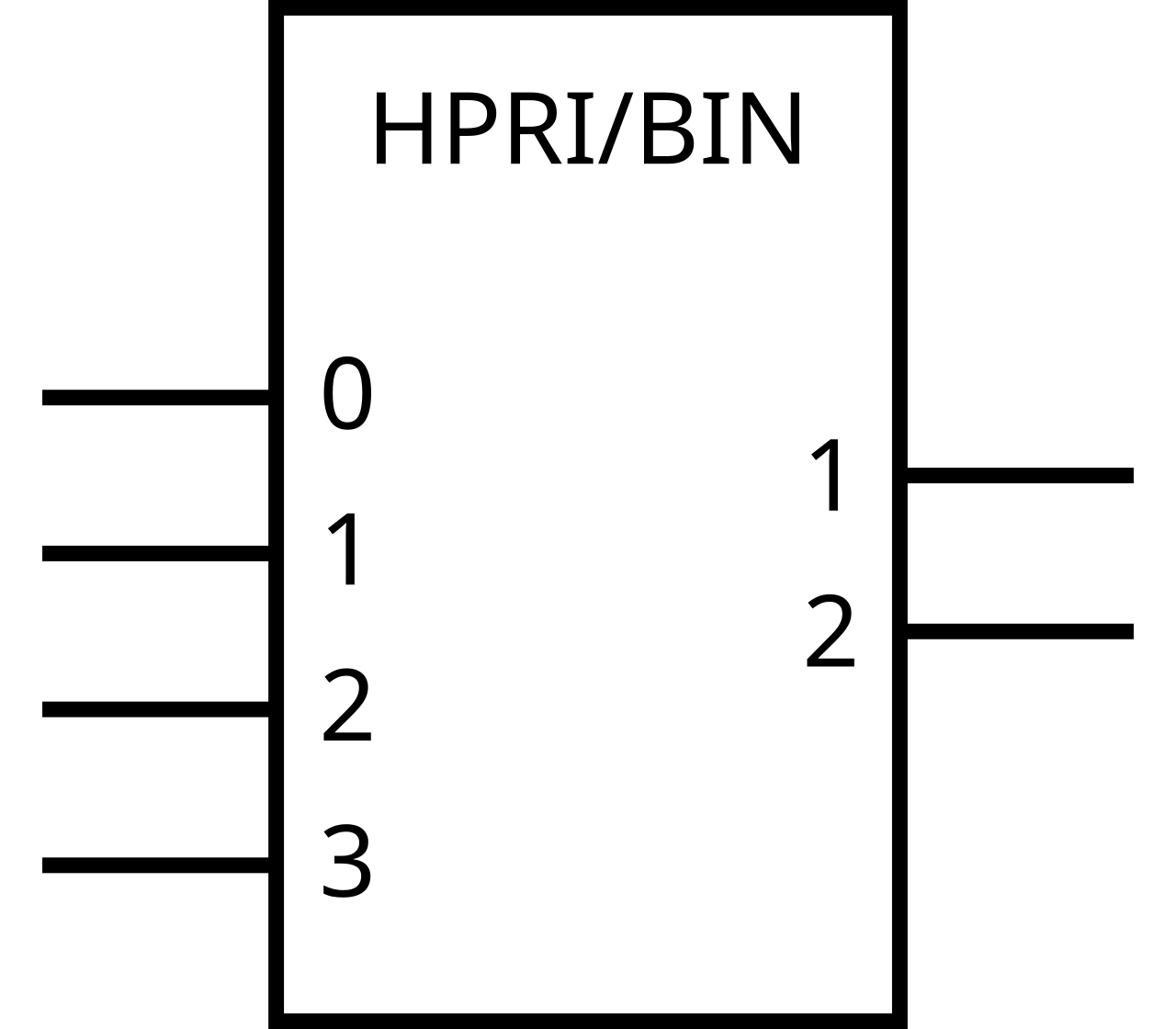 Image: 4-to-2 priority encoder, IEC symbol, CC0. IEC block symbol for a 4-to-2 priority encoder with valid-output
Image: 4-to-2 priority encoder, IEC symbol, CC0. IEC block symbol for a 4-to-2 priority encoder with valid-output V. The internal logic is the OR network above; the block hides it.
{kind=link}
Priority encoder
A plain encoder assumes exactly one input is asserted at a time. If two inputs go high simultaneously, the output is the OR of their codes — usually meaningless.
A priority encoder fixes this. It assigns a priority to each input and outputs the code of the highest-priority input that’s currently asserted. Lower-priority inputs are ignored when a higher-priority one is on.
Common convention: highest input index has highest priority. So if and are both high, the priority encoder outputs the code for .
Priority encoders also typically have a “valid” output — high when at least one input is asserted, low when no inputs are asserted. In that case the binary output is meaningless, since “none” doesn’t have a unique code in -bit binary.
Priority encoders show up in interrupt controllers (the highest-priority pending interrupt is the one the CPU should service next), in floating-point normalization (find the highest set bit in the mantissa), and in arbitration circuits.