Two LTI systems combine in two basic ways: cascade (series) and parallel. The overall system is again LTI, and its impulse response is computable from the parts.
Cascade (series) connection
Two systems and are in cascade when the output of the first is the input of the second:
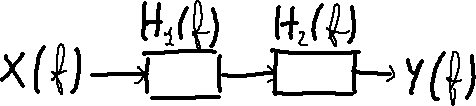 Image: Series block diagram interconnection, CC BY-SA 3.0
Image: Series block diagram interconnection, CC BY-SA 3.0
{kind=link}
By associativity of convolution,
so the cascade is equivalent to a single system with impulse response
By commutativity of convolution, , so cascading ” then ” gives the same overall system as ” then .” That’s a strong claim, and a consequence of LTI specifically; for nonlinear or time-varying systems, order matters in general.
In the frequency domain, the cascade’s transfer function is the product:
This is why you can chain filters in any order without changing the overall response: they multiply.
Parallel connection
Two systems are in parallel when they share an input and their outputs are summed:
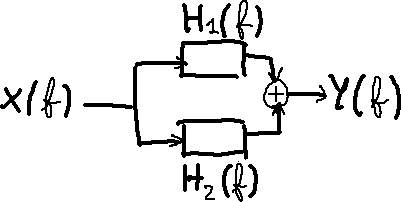 Image: Parallel block diagram interconnection, CC BY-SA 3.0
Image: Parallel block diagram interconnection, CC BY-SA 3.0
{kind=link}
By distributivity of convolution,
so the parallel combination is a single system with impulse response
and transfer function .
Mixing the two
Cascade and parallel combine arbitrarily to build big systems out of simple blocks. At each level, the overall impulse response is computable from the parts using the rules above. Analog circuits, control system block diagrams, and signal-processing chains are all built this way, then analyzed by reducing to a single equivalent impulse response (or transfer function).
An identity that drops out of this picture for complementary first-order filter pairs: when the highpass is and the lowpass is . Their transfer functions sum to , so a highpass and lowpass at the same cutoff in parallel reconstruct the full signal. This is specific to the first-order pair; two higher-order filters labeled HPF/LPF at the same cutoff (e.g., second-order Butterworth) do not generally sum to 1.
Feedback
A third connection, feedback, routes some of the output back to the input, and it’s the foundation of control theory. The course doesn’t treat it formally, but the same combinatorial framework applies: a feedback loop with forward gain and feedback gain has closed-loop transfer function . The factor is where stability and oscillation questions enter, and those are the central problems of control engineering.