For a constant-coefficient linear system where is with distinct real eigenvalues , the general solution is a linear combination of exponentials:
where is an eigenvector corresponding to .
This is the cleanest case. Distinct eigenvalues automatically give linearly independent eigenvectors, hence linearly independent solutions, hence a complete general solution.
Why eigenvectors give solutions
Plug into :
Cancel :
So must be an eigenvalue of and a corresponding eigenvector. Lemma: is a solution of if and only if is an eigenvalue/eigenvector pair of .
The procedure
- Find eigenvalues: solve .
- For each eigenvalue , find an eigenvector: solve .
- Write general solution: .
- Apply initial conditions to find the .
Worked example
Solve .
Eigenvalues: .
Roots: , . Distinct real.
Eigenvector for : solve , i.e., .
The two rows are dependent (second is twice the first), giving . Pick , :
Eigenvector for : solve , i.e., .
Gives . Pick , :
General solution:
In components:
Diagonal special case
If is diagonal, the eigenvalues are the diagonal entries and the eigenvectors are the standard basis vectors. The system decouples completely:
Each component is a 1D ODE: . The general solution is
When isn’t diagonal but has distinct eigenvalues, the eigenvector basis effectively diagonalizes the system in a rotated frame — same idea, different coordinates.
Stability and qualitative behavior
Long-term behavior depends on the signs of the eigenvalues:
- All : solutions decay to zero. Origin is asymptotically stable (a stable node in 2D).
- All : solutions grow exponentially. Origin is unstable.
- Mixed signs: solutions in some directions decay, others grow. Origin is a saddle point (unstable).
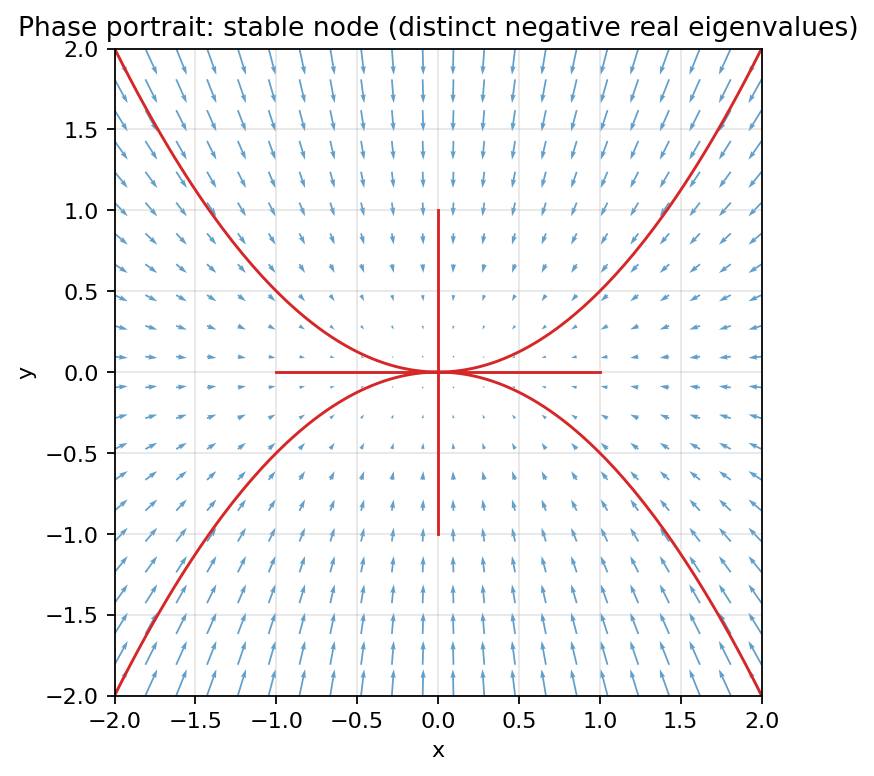 Stable node: distinct negative real eigenvalues. Trajectories approach the origin tangent to the slower eigendirection.
Stable node: distinct negative real eigenvalues. Trajectories approach the origin tangent to the slower eigendirection.
For 2D phase portraits, see Phase plane behaviour cases 1, 2, 3.
For other eigenvalue scenarios, see Complex conjugate eigenvalues case and Repeated eigenvalues case.