A damped mass-spring oscillator is the canonical second-order linear ODE in mechanics: a mass attached to a spring with stiffness , subject to friction proportional to velocity (damping coefficient ), possibly with an external driving force .
The equation of motion (Newton’s second law applied to the mass):
The unknown is the displacement from equilibrium. The three terms represent:
- : inertia.
- : friction (opposes motion).
- : spring restoring force (Hooke’s law).
Without external force (), the equation is homogeneous and describes free oscillation.
Three regimes based on damping
Solve via the Characteristic equation:
Discriminant: .
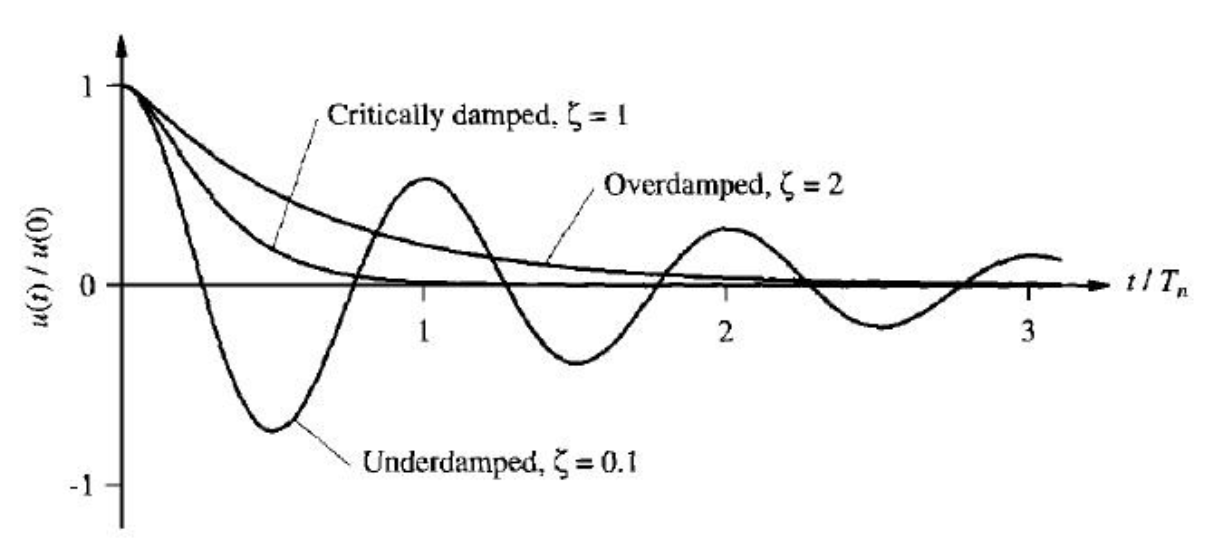
Overdamped:
Two distinct real roots (both negative if ). Solution:
The system returns to equilibrium without oscillating. Like pushing a mass through honey: slow, monotonic decay.
Critically damped:
One repeated real root . Solution:
This is the boundary case: the system returns to equilibrium as fast as possible without overshooting. Cars’ shock absorbers are tuned for this.
Underdamped:
Complex conjugate roots where , . Solution:
The system oscillates with decreasing amplitude. The envelope shrinks (since for ), while the cosines and sines describe the oscillation at frequency .
A bell ringing, a tuning fork, a shock-absorber on a worn-out car — all underdamped.
Undamped:
No friction. Roots purely imaginary: with . Solution:
Pure sinusoidal oscillation forever. The natural frequency is .
Driven oscillators
Adding an external force :
The solution is where is the homogeneous (transient) solution and is a particular (steady-state) solution. See Particular solution and complementary solution.
For sinusoidal driving , the response depends critically on whether damping is present:
- Undamped (). When exactly, the particular solution can no longer be a pure sinusoid — it picks up a factor of and grows without bound. This is “pure resonance” in the textbook sense: amplitude as .
- Damped (). The amplitude stays bounded for every driving frequency. The steady-state amplitude is maximized not at but at a slightly lower frequency (when underdamped), and the peak amplitude is finite, proportional to .
So an RLC circuit with does not blow up when driven at its natural frequency; it just rings loudest near that frequency. Don’t carry the unbounded-amplitude picture from the undamped case over into damped systems. See Resonance for the full treatment.
Electrical analogy: RLC circuit
The same equation describes an RLC series circuit. Kirchhoff’s voltage law for charge on a capacitor:
Direct analogy with mechanical:
- (inductance) ↔ (mass).
- (resistance) ↔ (damping).
- (inverse capacitance) ↔ (spring stiffness).
- (applied voltage) ↔ (force).
Same math, same three regimes. Underdamped circuits oscillate (radio receivers), critically damped for fastest transient response (good for some control systems), overdamped for monotonic settling.
This isomorphism is why one course can cover “mechanical and electrical vibrations”: they’re the same equation in different costumes.
Stability
For (positive damping): all solutions decay to zero. The equilibrium is asymptotically stable (see Stability of autonomous systems).
For : solutions oscillate forever. The equilibrium is stable but not asymptotically stable (a “center”).
For (negative damping, energy injection): solutions grow exponentially. The equilibrium is unstable.
This stability picture maps onto Phase plane behaviour.