A Bode plot shows an LTI system’s frequency response as two plots, side-by-side or stacked, sharing the same logarithmic frequency axis.
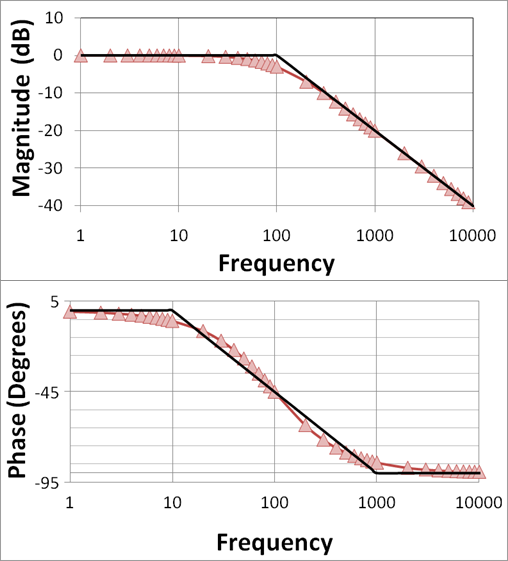 Image: Bode magnitude and phase plots of a low-pass filter, CC0 / public domain. Straight-line asymptotic approximation (black) versus the actual response (red).
Image: Bode magnitude and phase plots of a low-pass filter, CC0 / public domain. Straight-line asymptotic approximation (black) versus the actual response (red).
{kind=link}
- Magnitude plot: in decibels vs .
- Phase plot: in degrees (or radians) vs .
The logarithmic frequency axis compresses a wide range (sometimes 6+ decades) into a readable picture, and the dB magnitude makes pole-zero structure visible at a glance.
Why logarithmic
Plotting on linear axes hides structure. and both look like narrow spikes near , indistinguishable on a linear plot. On a log-magnitude plot, decays at and at , completely different.
The dB scale also turns multiplication into addition: cascaded filters’ contributions just add in dB, so you build up the response of a complex system from simple pieces.
Construction rules: magnitude
Write the transfer function in factored form, with each factor of the type for a pole or for a zero:
The dB magnitude is the sum of dB contributions from each factor.
- Constant : horizontal line at .
- Simple pole at : flat at for , then for . Transition is centered at the corner frequency , where the true curve is below the asymptote.
- Simple zero at : flat at for , then for . Same corner-frequency structure, at the corner.
- Pole at origin (): line of slope everywhere, passing through at . No corner frequency.
- Zero at origin (): line of slope everywhere, through at .
Combine by adding all contributions on the same axes. Each pole adds past its corner; each zero adds .
Construction rules: phase
Same factor-by-factor sum.
- Constant : phase (or if ).
- Simple pole at : transitions from to over two decades. Asymptotic approximation: at , at , at .
- Simple zero at : same shape but to .
- Pole at origin: constant phase at all .
- Zero at origin: constant phase at all .
Worked example: first-order lowpass
— one pole at , no zeros, constant 1.
Magnitude:
- (a decade before corner): .
- (corner): (true) or (asymptotic).
- (decade past): .
- (two decades past): .
Phase:
- : .
- : .
- : .
This is the canonical first-order lowpass Bode plot. Recognize it on sight.
Reading Bode plots backwards
Given a magnitude plot on log scales, you can extract system structure:
- Low-frequency level gives . A flat low-frequency segment means no pole or zero at origin; a slope means one pole or zero at origin.
- Each corner frequency corresponds to a pole or zero. Slope drops past corner = pole; slope rises past corner = zero. Slope changes of mean double poles/zeros.
- High-frequency slope tells you the order: for poles and zeros with .
Extracting from an experimentally measured Bode plot like this is the bread-and-butter of working with real filters and systems.
RC filters (Electronics I)
The first-order RC filters are the textbook one-corner Bode plots. The RC lowpass filter is flat then rolls off at past ; the RC highpass filter rises at below the same then flattens. Amplifier-bandwidth and coupling-capacitor effects read straight off these slopes.