The poles and zeros of a transfer function are the roots of its denominator and numerator polynomials, respectively. They’re the handles for reading an LTI system’s dynamics off the s-plane.
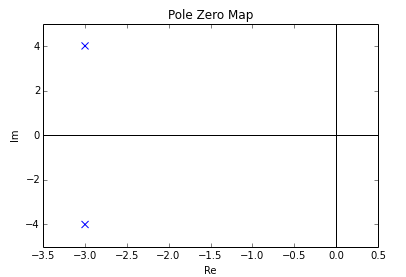 Image: Pole–zero plot in the s-plane, CC BY-SA 4.0. Poles marked ×, zeros marked ○.
Image: Pole–zero plot in the s-plane, CC BY-SA 4.0. Poles marked ×, zeros marked ○.
{kind=link}
For with both polynomials in :
- Zeros: values of where , the roots of .
- Poles: values of where , the roots of .
Why pole locations matter
The poles of are the eigenvalues of the system’s differential equation, the rates at which the system decays with no input. So they encode every time-domain feature of the impulse response:
- Real part of pole : decay (or growth) rate. Negative → decaying transient; positive → growing (unstable).
- Imaginary part of pole : oscillation frequency. Nonzero imaginary part → oscillation.
- Distance from origin : natural frequency , the speed of the response.
- Repeated poles of order at bring in the full set of polynomial-times-exponential terms . The highest-order term dominates at large , but all the lower-order terms appear in the partial-fraction expansion and contribute to the early-time response.
A first-order pole at corresponds to a decaying exponential with time constant . A pair of complex-conjugate poles at corresponds to a damped sinusoid .
Stability from poles
For a causal LTI system, BIBO stability requires all poles in the open left half-plane (negative real parts). Poles in the right half-plane → unstable (growing). Simple poles on the imaginary axis → marginally stable (sustained oscillation, neither growing nor decaying). Repeated poles on the imaginary axis → unstable (growing oscillation).
This pole-location criterion is the workhorse test in classical control and filter analysis.
What zeros do
Zeros don’t determine stability; they don’t appear in the system’s natural response. But they shape the frequency response: at a zero on the imaginary axis , the system completely blocks the frequency . This is how notch filters kill specific frequencies (60 Hz hum, for instance).
In the Bode plot, a zero adds dB/decade to the magnitude slope past its corner frequency and adds to the phase; a pole adds dB/decade and . Zeros and poles “cancel” each other when they’re close, and the spacing between them shapes the rolloff.
Pole-zero plot
A pole-zero plot is a sketch of the s-plane with poles marked as × and zeros as ○. From the plot you can read off the system’s behavior:
- All בs in the left half-plane → stable.
- Any × on or right of the imaginary axis → unstable or marginally stable.
- ○ at → DC zero (signal is “AC-coupled” through this system).
- ○ near a ×: zero-pole cancellation; the corresponding mode is mostly suppressed.
Filter design language
Filter design comes down to placing poles and zeros on the s-plane to get a desired frequency response. Different filter families (Butterworth, Chebyshev, Elliptic) correspond to different pole/zero placement strategies, trading off passband flatness, transition bandwidth, stopband attenuation, and order.